CS-12�״�������뼤�������LIDAR��ԭ����Ӧ�ñȽ�
2012-04-13 09:57:49 ��Դ������
�ڽ�ͨ�����ϣ��ٶ��Ǽ�����������·��Ч�ͽ�ͨ״���Ļ�����Ҫ����֮һ���ٶ����ݵ��Ѽ������������֣������˹������̶�������ʻʱ�䡢ѹ��Ƥ�ܷ�����Ȧ����Ӱ���������״���ٷ��뼤����ٷ��ȡ����к���������Я�������Ҿ�ȷ�ȸߵķ�������˹��ܲ��á�
���������г��ڽ�ͨΥ����ռ��*��������һ����ɴӸ��ٹ�·��ȥ�����Υ��淢��Ŀ�У����ٰ���������������֮�����ҿ������ߣ��������г�һֱ����Ϊ������֮��Ҫ����֮һ����˴ӽ�ͨ*�۵���ԣ�ȡ����ϵ�ȽϾ����ά����ͨ��ȫ֮�ֶΡ�����ȡ��Υ�泬��һ�����״����ǹ�����ߣ����оٷ��������������豸��ֻ�ǽ��������״������ʢ�У��۸��ռ���֮��ʹ���������ֹʹ�ã�һ����������֮������Ϊ��۸�ֻ���ӱ�һ������ȡ�Ļ��ἴ����ȫ���ճɱ����Խ�ͨ���̹۵���������ʻ����װ���״����������·�߶�������õij��ټ������ʻ�˸�֪�ܲ��٣�����Ϊ*��Աִ��ȡ�����ձ���������������ʧ���⣬������������¹�֮���ܡ�
�����г��ٶȵļ��������������������֣������״���ٷ���������ٷ���Ӱ����������Ȧ�����Լ�Ƥ��ѹ�����̶���������ʻ��ʱ��ȡ������״���ٷ���������ٷ���Ӱ����������Ȧ����ʵ�������й㷺���ã����״������Я�����ף���ȷ�ȸߣ�ʹ�÷��㣬���˶���Ҳ��ʵ�ֳ��ټ�⣬�����ʺ���“��������*”�������״���������ҹ��������ܲ����䱸*��IJ����豸��Ӱ����������Ȧ��һ���Ӧ���ڽ�ͨҪ����·�ں��мʿ��ڣ�����پ��ȱ��״���ٷ��ͼ�����ٷ��Ե͡�
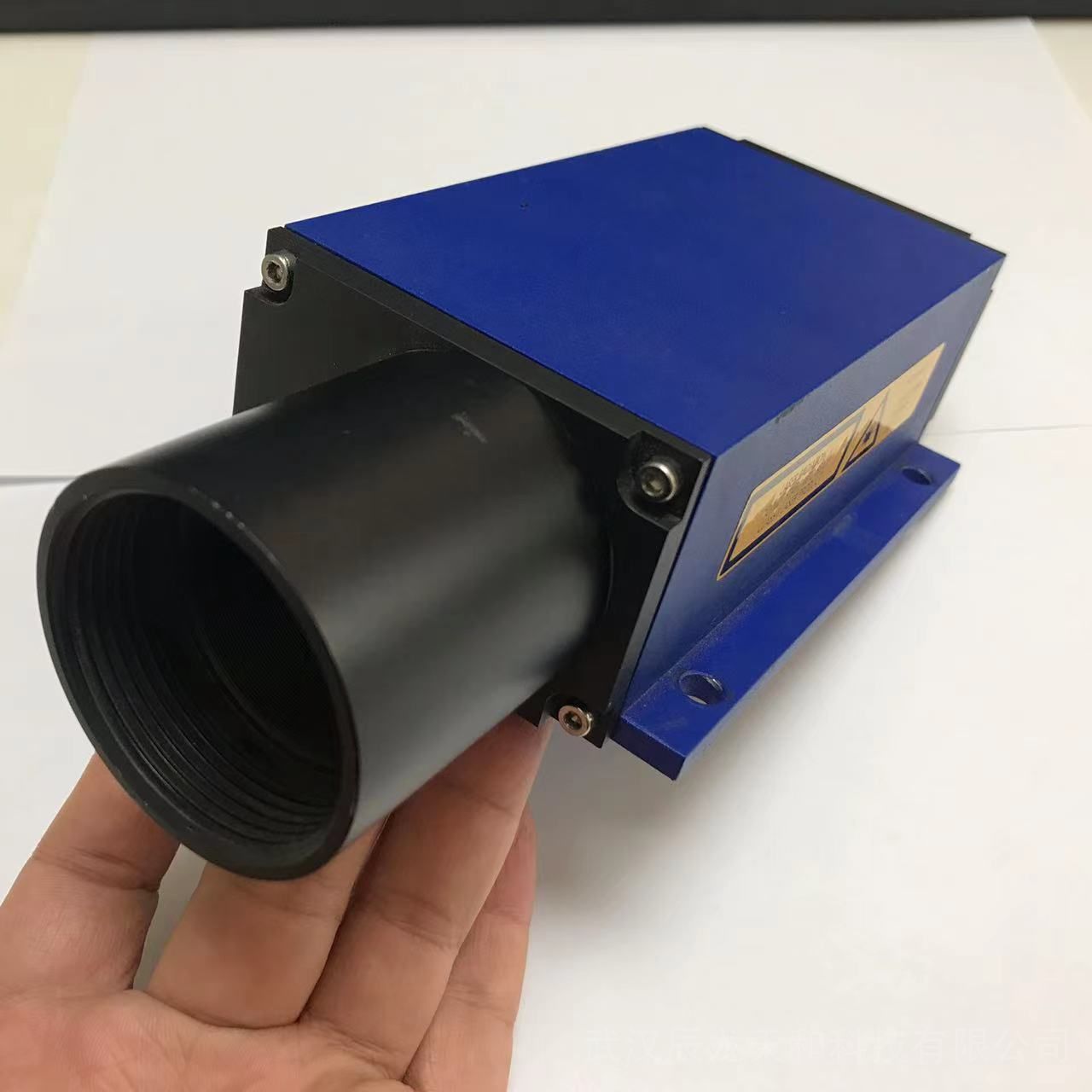
����2 CS-12�״������������ACI���������STAKLER�ıȽ�
����2.1 ���������
��������������Dz��ü������ԭ���������ࣨ����Ų������ٶ�Ϊ30����/�룩����ͨ���Ա������巢�伤������������ոü�������ķ��䲨����¼��ʱ����ȷ��������������Ե�ľ��롣��������ǶԱ�����������������ض�ʱ�����ļ����࣬ȡ���ڸ�һʱ���ڱ���������ƶ����룬�Ӷ��õ��ñ���������ƶ��ٶȡ�
������������Dz��ü�����ԭ������������ͨ���Ա������巢�伤������������ոü�������ķ��䲨����¼��ʱ����ȷ��������������Ե�ľ��롣��������ǶԱ�����������������ض�ʱ�����ļ����࣬ȡ���ڸ�һʱ���ڱ���������ƶ����룬�Ӷ��õ�����������ƶ��ٶȡ�������پ��������ص㣺
������1�����ڼ����������Ϊ���ߣ��ʲ��پ���������״������Ч����ԶһЩ���ɲ�l 000m�⣻
������2�����پ��ȸߣ����
������3�������������Ҫ����ֱ�ڼ��������ƽ�淴��㣬�����������̫Զ�Ҵ����ƶ�״̬�����߳���ƽ�治�����¼�����ٳɹ��ʵ͡��Ѷȴ��ر���ִ�ھ�Ա�Ĺ���ǿ�Ⱥܴ�����ƣ�͡�
������4��������������������˶���ʹ�ã�ֻ���ھ�ֹ״̬��Ӧ�á���ˣ���������Dz��ܳ�֮Ϊ“��������*”���ھ�ֹ״̬��ʹ��ʱ�������ױ�˾�����֣���˴ﲻ��Ԥ��Ŀ�ġ�
������5���۸����ھ�������;�����ڵļ�������ǣ�����ȡ���Ϳ��Ʋ��֣��۸�������һ����Ԫ���ҡ�
����2.2 �״������
�����״���ٵ�ԭ����Ӧ�ö�����ЧӦ�����ƶ�����������յĵ�Ų���Ƶ�Ƶ�ЧӦ���״�������Ǹ��ݽ��յ��ķ��䲨Ƶ�����ļ�����ó�����������˶��ٶȡ�
�����״���ٵ�ԭ����Ӧ�ö�����ЧӦ����˾��������ص㣺
������1���״ﲨ���ȼ�����������ߣ��������������״�������ڲ�Ŀ�꣬���뾫ȷ����
������2���״�����豸�ɰ�װ��Ѳ�߳��ϣ����˶���ʵ�ּ��٣���“��������*”�dz���Ҫ����ɲ��֣�
������3���״�̶��������Ϊ±1 km/h���˶�ʱ�����Ϊ±2 km/h����ȫ��������Խ�ͨΥ�²鴦��Ҫ��
������4���״��ĵ�Ų�������һ�����Žǣ�����Ч���پ�������ڼ�����ٽ�һЩ��*Զ���پ���Ϊ800 m����Դ���
������5���״�����Ǽ������죬�۸����С�
������6���״�����Ƿ��䲨�����Ž���һ������Ҫ�ļ���ָ�ꡣ�Ž�Խ����ȷ��Խ����Ӱ�죻��֮����Ӱ���С��
�����״����������۸���ˣ�����ȷ��ʹ�÷���������˶���ʵ�ֳ��ټ�⣬���ҹ��������ܲ�����Ϊ���ٴ�������ѡ���ߡ�
����3 ������ԭ��
�����״�����ǵĹ���ԭ���Ƕ�����ԭ����Ҳ�����������״ﲨ������ƶ������ٶȵ�ԭ���������ۻ�����Դ����“������ЧӦ”��
����������Ƶ�ʼ���������ɡ����ߵ粨���н������У���������ʱ�ᷴ�䣬���ҷ�������IJ�����Ƶ�ʼ��������������������������ƶ�״̬���ı䡣�����峯�����ߵ粨����ķ���ǰ������ʱ��������������ߵ粨�ᱻѹ������˸õ粨��Ƶ�ʻ���֮���ӣ���֮�������峯��Զ�����ߵ粨�����н���������������ߵ粨��Ƶ�ʻ���֮��С������Ƕ�����ԭ����
���������״���Ӧ�õ�ԭ�������Ǽ�ⷢ��������ߵ粨��������������ߵ粨֮���Ƶ�ʱ仯������������ͬƵ�ʵIJ�ֵ������������ض��ı�����ϵ��������ò�����ײ����������ٶȡ�����
����fd=2/c��Kfov�� ��1��
��������vΪĿ���˶��ٶȣ�cΪ��Ų��ڿ����еĴ����ٶȣ���һ��������foΪ�״�ķ���Ƶ�ʣ���һ����֪����K�ǵ�λ����ϵ��Ϊ3.6/106��fdΪ���������˶�Ŀ������Ķ�����Ƶ�� �������������ʯӢ����������֤���ɼ���������ٶȻ�����͵���ʾ����ʾ��
����4 �״���ٲ���
����Ŀǰ�����������ѶίԱ��FCC�涨*����Ƶ����Xband��K band��Ka band���֣���������Ӧ����Ƶ�ʷֱ�Ϊ10.525 GHz��24.150 GHz��33.40��36.00GHz��
�����ҹ����ߵ�������Ź涨��*����Ƶ��ͬ����FCC��涨�IJ���Ƶ����ͬ�������������ҹ���Ka band��Ƶ�������˸��Ӿ���Ĺ涨��Ϊ35.100 GHz��
�������⣬ŷ�涨��*����Ƶ���У�
����Ku band��13.450 GHz��K band��24.125 GHzX band�״���״ΪԲ�Σ��������������䣬���پ���Ϊ150 m~4750 m���������ܵ����ţ�ͨ��ֻ���ڳ����м�*�����ӵ��ٶȡ���ǰX band�״����������ϵͳ����ʹ�ã��������ڵIJ�����������*���ٷ�Χ����200km/h~300km/h��
����K band�����״�������ֳ�ʽ��Ҳ����װ��*�Ϻ������豸��ͬ����“��������*”�����ڹ��ھ���ʹ�õľ��ֶ������ֲ����״K band����ʽ��������ϵͳ���ʽ������Ҳ��ױ����š�Ŀǰ�״��������������dz��̣���������ϵͳ�ɼ�װ����Ʊ���ҹ��ִ�й�������*���ٷ�Χ����200 km/h~320 km/h��
����Ka band�״���K band�����״����ƣ���������Ƶ�ʸ��ߣ����ٷ�Χ��Ϊ���У����Ը��Ӳ��˱����š����ڹ����õ������״���Ҫ�ǰ���ͭ�������IJ�������������IJ����״
������ì��Ȼ�ͻ��жܣ������״�����ǵ����չ���������״�׳Ƶ��ӹ���Ҳ�����ˡ��������״���һ�ּ���״�����ǵ��豸����װ�������ڣ�������һ�������ڼ���Χ�Ƿ����״�����ǡ���������ʻ�����У������������״������ʱ��ᷢ������������˾�����ͳ��١�̫�����ķ������״��Ŀ�����Ҳ��һЩ����Щ�������״�����GPSȫ��λϵͳ���м�أ����ԶԵ�����Υ������ϵͳ����Ȧ��Ӧʽ����ϵͳ��ǰ������������ʾĿ����롣����һ�����ӹ����˲���װ�õ���У����ǹ��ߵ���ʻ�ٶȶԼ�ʻ��ȫΣ���ܴ��ҵ������״���ʾʱ�����ɲ��Ҳ��������¹ʣ���˰�ȫ��ʻ����*��Ҫ�ġ�
�������ſƼ����ϵķ�չ�����ӶԿ��������ϳ��죬���ŶԸ��������״������Ӧ�Ľ��������
�������緢����ҵIJ���װ���Ƚ����ơ������ڸ��ٹ�·�ϣ����й̶��ص�����ٶȼ�⣬Ҳ������Ѳ�߳������ڹ�·������ƶ�������
����5 �״������Ӧ���е��Ƚ�����
����Ŀǰ���緢����ҵ��״����װ���Ƚ��Ƚ�����DSP������90��������Ѿ���ʼӦ����*��“*���ٶȸ��ټ���”��90���ڿ�ʼӦ�ã�“�����Ӧ����”Ҳ��1998�꿪ʼ�ռ�������*�µ�“ͬ������������”Ҳ�ڽ��걻����Ľ��ܲ��Ŵ����ɹ���
�����״�Ϊ�������ߵ�ز���̽��Ŀ�귽��;����һ��װ�á�ȫ���翪ʼ��Ϥ�״�����1940��IJ��е߿�ս�У��߰ټ������״��Ӣ��ս������������ǧ����Ϯ�ĵ¹���ը���������д����ʷ�����δ�ս���״↑ʼ�������ƽ��;��������Ԥ�ⷽ�棬����������Ⱪ���ꣻ�ڷɻ��ִ����а�ȫ���棬���ɰ��������Ա������������Ա����Ч��������ǵ�����
������������ͨѶ�����ij��ֲ���������״���ŵ�������ͬʱ���������״������ȷ�ԡ�����˹�¿�DSP���״����ÿһ������ʵ��������������Ȧ������A/Dת����Ȧ������������Ȧ��90°����ͬʱ�ṩ�������źš��ڼ��㵥Ԫ�ڣ�����ͨ�������ֻ���������Ϣ���͵�DSP��Ȧ��ÿ�����ٵ�DSP��Ȧ���DZ��ÿһ��ͨ������Ϣ�����ۺϵĸ���Ҷ���ٱ任���Ի��ÿһ��Ŀ��ķ���
����*���ٶȸ��ټ��������״����ڲ���һ��Ŀ�공�ٶ�ʱ����һ������ij�ʻ����*���ٶȸ��ټ����ij��ֲ����ò����߿��Լ�����Ŀ�공���и��ٲ�����ͬʱ�״ﻹ����ʾ���쳵���ٶȡ�
����ͬ���������������״���������н�����ͬ���������ѵ㣬*�¼����IJ����Ѳ�����Ҫ���������۾����ƺ��ֹ�����“�Ͽ�”��“����”Ŀ���Ա����Ŀ�공�������״��ܹ��Զ�ʶ��Ѳ�߳�ǰ�ij��ٿ�������Ŀ�공�ٶȼ����������ʹ��ͬһ�����IJ������෴����ģʽ����ͬ����ȷ�ͼ�
���������Ӧ�������Ƚ��ķ����Ӧ��������������ȥѡ���ض��Ľ�ͨ������м�ء�����Ŀ�공�Dz��Ǿ���*���ij�����Ҳ�������� ͬһ���������෴�������״ﶼ���Զ���������ٶȲ�������ʾ�����Ϣ��
���������״���Ҫϵ���ö�����ЧӦ��Doppler Effect��ԭ������Ŀ�����״����߿���ʱ�������ź�Ƶ�ʽ����ڷ����Ƶ�ʣ���֮����Ŀ��Զ�����߶�ȥʱ�������ź�Ƶ�ʽ����ڷ�����ʡ���˼��ɽ���Ƶ�ʵĸı���ֵ�������Ŀ�����״������ٶȡ�Ŀǰ�����ڻ���������һ���Բ����Ҳ�������ϴֲڣ����Ƚ�������ʹ�÷�����Ȼ���ںܴ��ࡣ�������Ž�ͨ��·�IJ�����չ�����ٹ��������װ��Ҳ���������ƣ�ʹ���״�����ǣ�ʹ˾����ȫ��ʻ�����ٳ�����ʻ���ﵽ�����¹ʵķ�����
 ɨһɨ���ֻ����
ɨһɨ���ֻ����